- A+
第一步:Linux中启用串口设备。【以树莓派4B为例】
树莓派4B有6个串口,参考上一篇《树莓派4B串口配置与开发》,在 /boot/config.txt 中添加一行,开启 uart2 功能:
dtoverlay=uart2重启后,查看是否有多出来一个 /dev/AMA1 设备:
$ ls -l /dev/tty* crw-rw---- 1 root dialout 204, 64 Jul 20 11:52 /dev/ttyAMA0 crw-rw---- 1 root dialout 204, 65 Jul 20 11:59 /dev/ttyAMA1 crw------- 1 root root 5, 3 Jul 20 11:52 /dev/ttyprintk crw--w---- 1 root tty 4, 64 Jul 20 11:52 /dev/ttyS0也可以config.txt 中添加多行(uart2,uart3,uart4,uart5)启动多个串口功能 (对应 ttyAMA1,ttyAMA2,ttyAMA3 和 ttyAMA4).
可以用下面命令查看 uart2 对应的GPIO针脚映射:
# dtoverlay -h uart2 Name: uart2 Info: Enable uart 2 on GPIOs 0-3. BCM2711 only. Usage: dtoverlay=uart2,<param> Params: ctsrts Enable CTS/RTS on GPIOs 2-3 (default off)从输出可见,GPIO针脚为0-3, 其中针脚0和1分别为TxD和RxD,针脚2-3为流控 CTS/RTS. 此处针脚0-1为BCM编码号,物理引脚号为27-28.
第二步: 使用python代码,测试 uart2 功能是否正确
硬件接线: 将 GPIO引脚0 和 1 短接,实现自发自收。
软件测试:python控制台中,执行如下代码测试
>>> import serial >>> ted = serial.Serial(port="/dev/ttyAMA1", baudrate=9600) >>> ted.write("Hello World".encode("gbk")) 11 >>> ted.read(11) b'Hello World' >>>能收到字串‘Hello World’表示 uart2 功能和接线均一切正常。
第三步:编辑 CodeSys 配置文件,映射 /dev/ttyAMA* 到 COMx 端口号。
在老版本的CodeSys 中,需要编辑 "/ect/CODESYSControl.cfg" 末尾添加:
[SysCom] Linux.Devicefile = /dev/ttyUSB portnum := COM.SysCom.SYS_COMPORT1;这样,在codesys中指定串口号1,代表使用的设备为 /dev/ttyUSB0, 非常不直观。
从codesys v3.5 SP15 起(据说),改为在文件 /etc/CODESYSControl_User.cfg 里这么设置:
[SysCom] Linux.Devicefile.1=/dev/ttyS0 Linux.Devicefile.2=/dev/ttyAMA1 Linux.Devicefile.4=/dev/ttyUSB0这样, Com1 即为 ttyS0, Com2即为 ttyAMA1, Com4 即为 ttyUSB0,依次类推。支持多个串口,方便多了。
如上面设置,映射关系 uart2 --> ttyAMA1 ---> Com2, 所以codesys中指定端口号为 2 (即Com2)即可。
第四步: CodeSys中编程实现串口收发功能
参考 youtube 上的学习视频: https://www.youtube.com/watch?v=NFREG2U07Rg
只需参考codesys编程部分即可,代码我在他基础上又做了修改完善,
(1)程序块导入3个库: Memory, Serial Communication, Util
(2)定义部分:
PROGRAM SerialPort VAR (*打开端口部分*) Open_0: COM.Open; Open_xExecute: BOOL := TRUE; //默认打开端口 aParams : ARRAY [1..7] OF COM.PARAMETER := [ (udiParameterId := COM.CAA_Parameter_Constants.udiPort, udiValue := 2), (udiParameterId := COM.CAA_Parameter_Constants.udiBaudrate, udiValue := 9600), (udiParameterId := COM.CAA_Parameter_Constants.udiParity, udiValue := INT_TO_UDINT(COM.PARITY.NONE) ), (udiParameterId := COM.CAA_Parameter_Constants.udiStopBits, udiValue := INT_TO_UDINT(COM.STOPBIT.ONESTOPBIT) ), (udiParameterId := COM.CAA_Parameter_Constants.udiTimeout, udiValue := 0), (udiParameterId := COM.CAA_Parameter_Constants.udiByteSize, udiValue := 8), (udiParameterId := COM.CAA_Parameter_Constants.udiBinary, udiValue := 0) ]; hCom: CAA.HANDLE; (* read模块 *) BLINK0: BLINK; Read_0: COM.Read; bReadData : ARRAY[1..80] OF BYTE; read_szSize: CAA.SIZE; sReadData : STRING; (* write模块 *) Write_0: COM.Write; write_xExecute: BOOL; //执行write操作 bWriteData : ARRAY[1..80] OF BYTE; sWriteData : STRING; sWriteDataLast : STRING; //上一次 Write值 END_VAR(3)梯形图部分
先要 打开串口 (串口参数在定义部分已预设定):
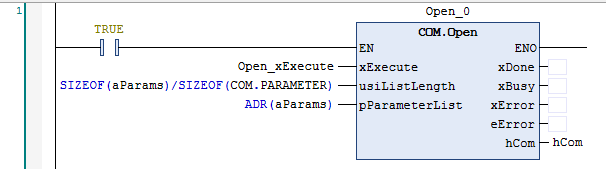
注意此处,参数 xExecute 需始终为 True,否则 会关闭串口 hCom=0 !
读串口部分的代码:
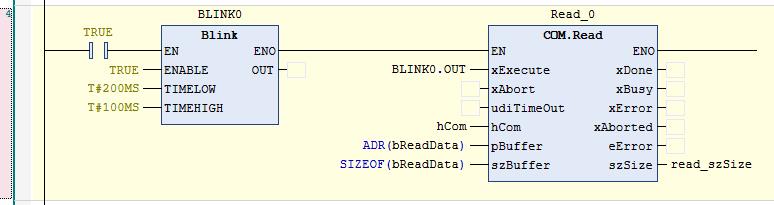
使用 blink 定期读取,读出的内容放到数组 bReadData 中,读出长度为 read_szSize.
为了防止读入空(读出为空是常态,有内容 是少数)时 覆盖掉前面值,非空时才拷贝和更新到某个string,代码如下:

这样,仅在有新内容读出时,才更新值到 sReadData 中。末尾的 MEM.MemFill() 用于写入 string 的结束字符 '�' .
下面到了 写串口 的部分。基本思路也是差不多,字符串中有新值时,才将 字符串内容 拷贝到 数组中用于写出,并使能一次写动作,代码如下:

之后开始真正的 串口写 动作:

代码后半行,如果写成功,就把此次内容保存到 sWriteDataLast 字串里,用于下一次比较,内容不同时才触发一次 COM.Write() 写动作。
需要注意的是,若写动作发生error,会一直卡住 不更新 sWriteDataLast,所以加上并联条件 Write_0.xError , 不管成功/Error失败 均结束此次写动作!就算写失败,想再一次尝试,也必须将 sWriteData 改为其他才能再次触发 写动作。
(4)CodeSys中测试串口读写功能
若串口正确打开, 则 hCom 的值非空,否则 hCom=0 表示失败。
blink产生的信号定时读一遍数据,有新内容显示在字串 sReadData 中;
字串 sWriteData 中的内容会通过串口写出去,只有更新 sWriteData 值的瞬间才会触发一次写操作,不管是否写出成功。
以上代码,使用 树莓派4B, Codesys 3.5.18.2 ,Codesys Control for Linux ARM64 SL 测试通过。
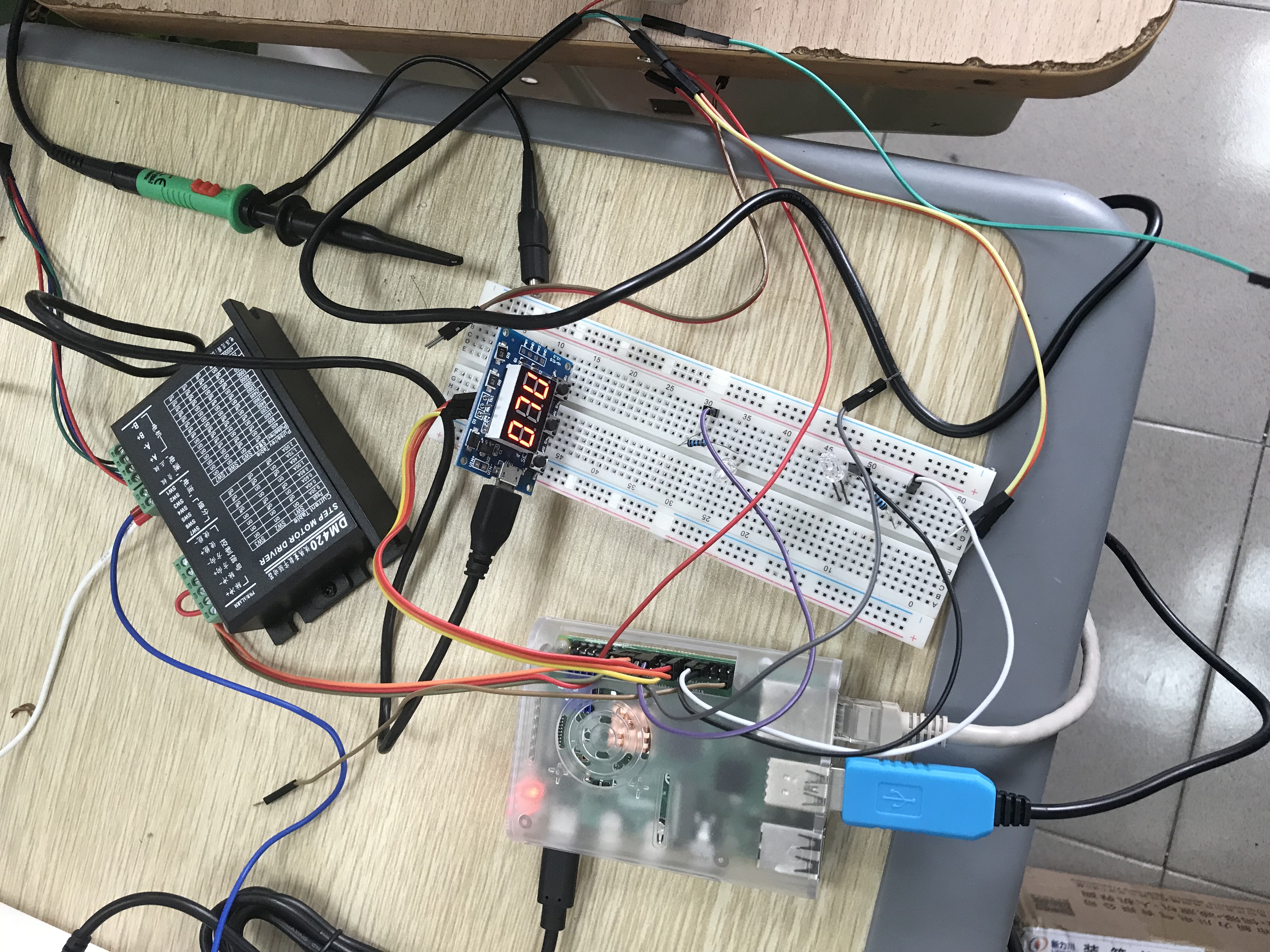
使用树莓派 自带的 uart2 (ttyAMA1)和 usb转ttl串口(ttyUSB0) 均测试通过。
2022-07-21




